








MBro-Vision System�� �������� ��Ǵ� ���� �ü����� ����Ǵ� ����,
���� ��� ���� ���� ��ǰ�� ���� �̵� �� ���Ǵ� ��ǰ�� ǰ����
��� ȿ������ �����ϱ� ���� ���� �ҷ��� �ǽð� �ľ��ϰ�, �м��ϴ� ����
Solution System�Դϴ�.
�������� �̵��Ǵ� ���� ��ǰ�� Full Live Image Data��
�ʰ��� Camera�� Data�� �����Ͽ� �ʰ��� �м� �� �����ϰ�, �̸� ǰ�� �� ���� �ü� ������ �����ϴ�
���� �����ڿ��� ���� ������ �ʿ��� ǰ�� �м��� Live Data�� ����� ���ǿ� �´�
�پ��� �������� �����ϴ� System�Դϴ�.
MBro-Vision System�� ����ü� � �� ���� ��ǰ�� ǰ�� �̻� ���� �ʰ��� Image �м� ��ɿ� ���� "�ǽð� Alarm" ��ȣ�� �����Ͽ� �ʰ������� ����Ǵ� ���� ��ǰ�� ǰ�� ��ȭ�� ��� ������ �� �ֵ���, ���� ��� ����ȭ�ϰ� ���꼺�� �ش�ȭ�Ͽ�, ���� ���� ���� �ߴ��� �ּ�ȭ�ϹǷ�, �������� ���������� ������ �� �ִ� �ý����Դϴ�.
����, ����, �ݼ�, Ƽ�� ���� �� �� Ȱ�� ������ �پ��ϸ�, ������ ���� ȯ�濡 ����ȭ�� ����Ǿ� �ܺ� �ڱؿ� ���ϰ� ���� ��ġ�� �����ϰ� ��� �����մϴ�.
MBro-Vision System�� ����ü� � �� ���� ��ǰ�� ǰ�� �̻� ���� �ʰ��� Image �м� ��ɿ� ���� "�ǽð� Alarm" ��ȣ�� �����Ͽ� �ʰ������� ����Ǵ� ���� ��ǰ�� ǰ�� ��ȭ�� ��� ������ �� �ֵ���, ���� ��� ����ȭ�ϰ� ���꼺�� �ش�ȭ�Ͽ�, ���� ���� ���� �ߴ��� �ּ�ȭ�ϹǷ�, �������� ���������� ������ �� �ִ� �ý����Դϴ�.
����, ����, �ݼ�, Ƽ�� ���� �� �� Ȱ�� ������ �پ��ϸ�, ������ ���� ȯ�濡 ����ȭ�� ����Ǿ� �ܺ� �ڱؿ� ���ϰ� ���� ��ġ�� �����ϰ� ��� �����մϴ�.


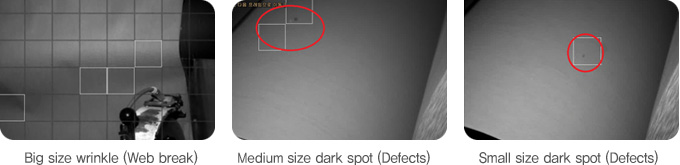
- �����: ��Web break�� and ��Defects��(2.56mm�� ~ )
- �ʰ��� �̵� Image�� Full Live Data�� Real Time
�м� �� ���� (100fps)
- Simple�� ��ġ, ���, Up-grade
- �ʰ��� �̵� Image�� Full Live Data�� Real Time
�м� �� ���� (100fps)
- Simple�� ��ġ, ���, Up-grade

MBro Vision �м��ý����� ����ũ�� �м��� ���� 3������ �ý������� �����˴ϴ�.
- ����ũ�� 2895mm���� �м��ϴ� �ý��� (Paper speed: ~ 2100m/min)
������ (Web Break)�� Alarm ��, ����м�, ��������
- ����ũ�� 8.56mm���� �м��ϴ� �ý��� (Paper speed: ~ 1800m/min)
������ (defects)�� Alarm ��, ����м�, ��������
- ����ũ�� 2.56mm���� �м��ϴ� �ý���
������ (defects)�� Alarm ��, ����м�, ��������
- ���� (Defects) Image:
- ����ũ�� 2895mm���� �м��ϴ� �ý��� (Paper speed: ~ 2100m/min)
������ (Web Break)�� Alarm ��, ����м�, ��������
- ����ũ�� 8.56mm���� �м��ϴ� �ý��� (Paper speed: ~ 1800m/min)
������ (defects)�� Alarm ��, ����м�, ��������
- ����ũ�� 2.56mm���� �м��ϴ� �ý���
������ (defects)�� Alarm ��, ����м�, ��������
- ���� (Defects) Image:
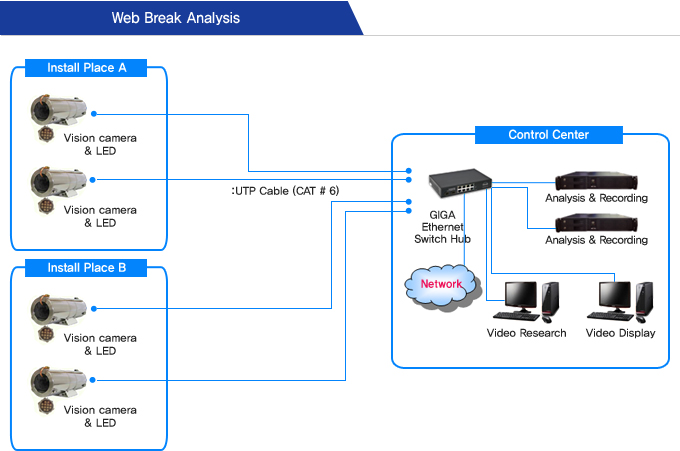
1. Created event log and alarm after analyzing the initiating point of Web Break
2. Transfer Alarm signal to control room and alarm tower or other facility
3. Use industrial high speed camera : 0.3M (VGA), 86fps, CCD
4. IR LED Strobe : 86fps, maximum pulse power : 9watt/LED
5. Maximum Paper Speed:
2. Transfer Alarm signal to control room and alarm tower or other facility
3. Use industrial high speed camera : 0.3M (VGA), 86fps, CCD
4. IR LED Strobe : 86fps, maximum pulse power : 9watt/LED
5. Maximum Paper Speed:
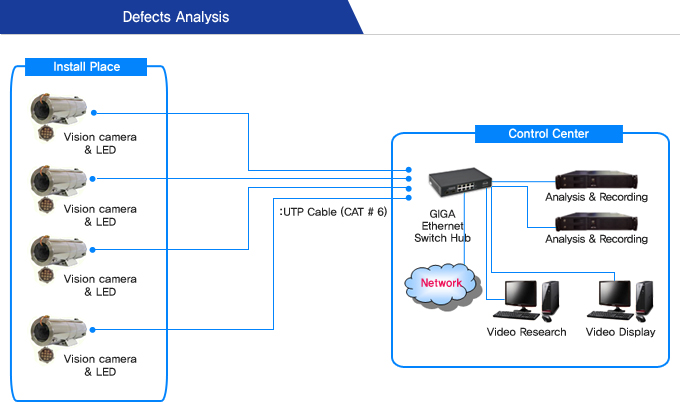
1. Created event log and alarm after analyzing detecting a defects of analysis algorithm
2. Transfer Alarm signal to control room and alarm tower or other facility
3. Use industrial high speed camera : 1.3M (HD), 30fps, CCD
4. IR LED Strobe : 30fps, maximum pulse power : 16watt/LED
5. Maximum Paper Speed:
2. Transfer Alarm signal to control room and alarm tower or other facility
3. Use industrial high speed camera : 1.3M (HD), 30fps, CCD
4. IR LED Strobe : 30fps, maximum pulse power : 16watt/LED
5. Maximum Paper Speed:

Event Properties & Standard value
1. Input value of properties for ��defect analyzing��
- Area (o) : Input number of pixel according to ��defect size��
Consist of pixel by ��defect size��: 1 ~ 10 pixel x 1 ~ 10 pixel
ex) 2pixel x 2pixel = 1.56mm x 1.38mm
- Height (o) : Recognized ��Area��
- Width (o) : Recognized ��Area��
2. Input value of properties for ��defect & web break analyzing��
- Bright/Dark (o)
A grade of bright & dark pixels to be compared standard image
Adjustment sensitivity of bright & dark to grades 1 ~ 90
- Aspect Ratio (x) - Relative Brightness (o) Express relation of light density level of Camera Light (LED) and Brightness of defect image Establish the best working condition of Camera Light (LED) - Relative Contrast (o) Relations of standard deviation to be expressed brightness and darkness of the defect pixel by produced Camera Light (LED) Establish the best working condition of Camera Light (LED) - Camera Positioning (o) : Input on set-up sheet
1. Input value of properties for ��defect analyzing��
- Area (o) : Input number of pixel according to ��defect size��
Consist of pixel by ��defect size��: 1 ~ 10 pixel x 1 ~ 10 pixel
ex) 2pixel x 2pixel = 1.56mm x 1.38mm
- Height (o) : Recognized ��Area��
- Width (o) : Recognized ��Area��
2. Input value of properties for ��defect & web break analyzing��
- Bright/Dark (o)
A grade of bright & dark pixels to be compared standard image
Adjustment sensitivity of bright & dark to grades 1 ~ 90
- Aspect Ratio (x) - Relative Brightness (o) Express relation of light density level of Camera Light (LED) and Brightness of defect image Establish the best working condition of Camera Light (LED) - Relative Contrast (o) Relations of standard deviation to be expressed brightness and darkness of the defect pixel by produced Camera Light (LED) Establish the best working condition of Camera Light (LED) - Camera Positioning (o) : Input on set-up sheet

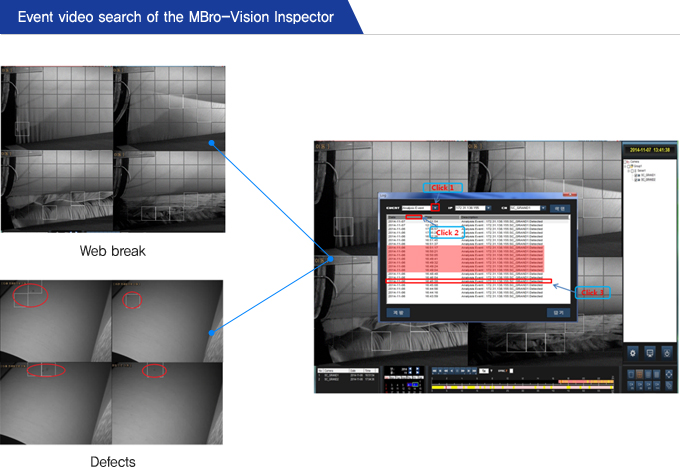
1. Click Event list
2. Click analysis Event
3. Pop-up the Event list
4. Double click of the working camera to be checked the Events
2. Click analysis Event
3. Pop-up the Event list
4. Double click of the working camera to be checked the Events
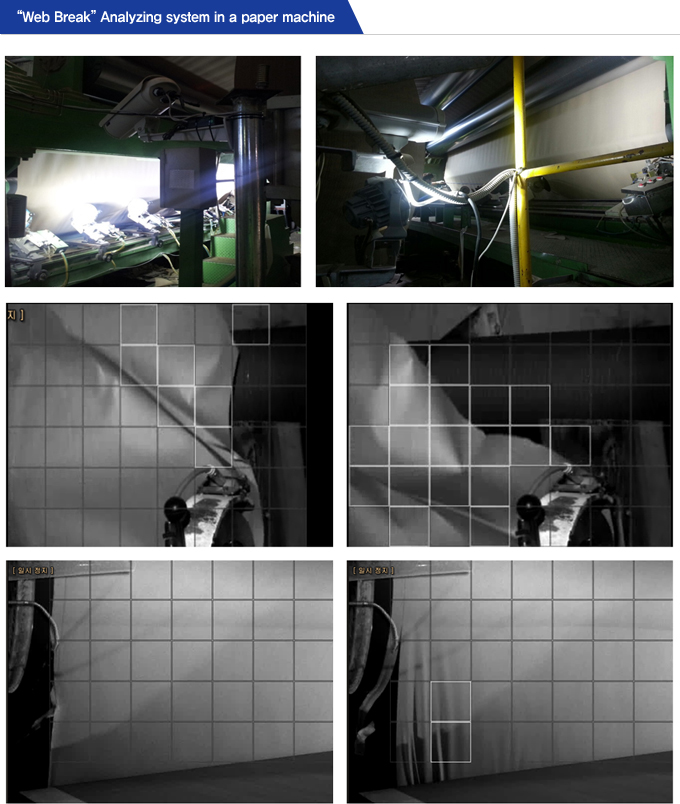
��Web Break�� Analyzing Image
�� Working point: ��WINDER��
�� Line Speed: ~ 2100m/min
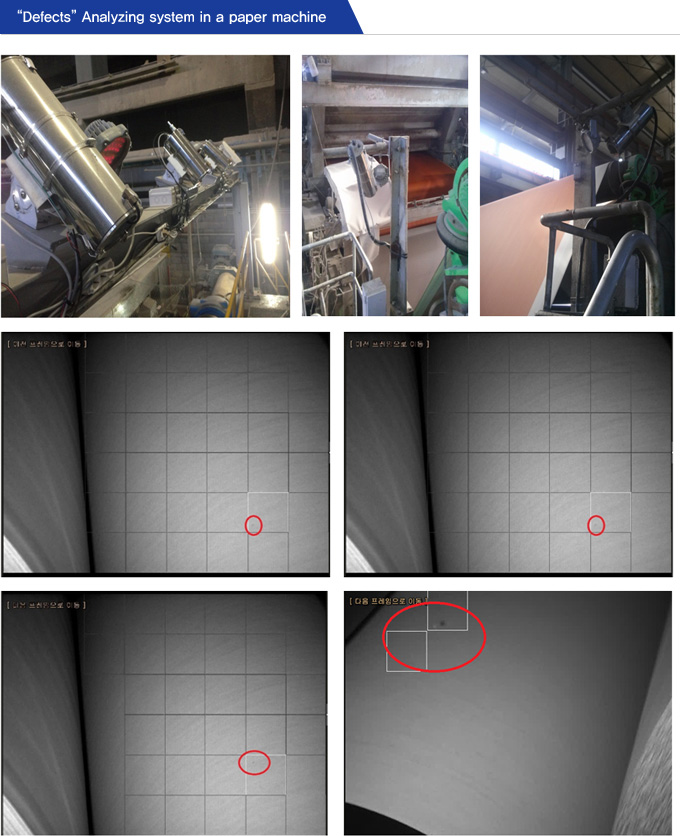
��Defects�� Analyzing Image
�� Working point: ��CALENDER��
�� Line Speed: ~ 2100m/min



������ ���� ����� CCD ������ ������ MBro-Vision-MC1 ���� ī��� �������� ��Ǵ� ī���� �������� �ŷڼ� ������ ������ �������� �����̴� �ǻ�ü�� �Կ��� �־� �ְ����� �ػ� �������� �����մϴ�. �̴��� �������̽��� ������� �Ͽ� ��ü���� ��ġ����� �����ϰ� DC ���� ����� Auto Iris ����� �����Ͽ� ��� Ȱ���� �����ϰ� �����մϴ�.
������ ���ٷ����� Ư�� ���۵� �Ͽ�¡�� �����̳� ������ ���� ����, ���� ���� ȯ��� ���� �ܺ� ���� �����κ��� ī��� LED�� ��ȣ�� �ָ� �������� ���Ͽ� �µ� ��ȭ�� ���� �ߵ� ���������� ��ǰ�� ������ �����մϴ�. ��ġ ȯ���� �����Ͽ� ���۵Ǵ� LED�� ��ο� ���� ���� ä���� ��⸦ �����Ͽ� �����ϰ� �ѷ��� ������ �����մϴ�.
������ ���ٷ����� Ư�� ���۵� �Ͽ�¡�� �����̳� ������ ���� ����, ���� ���� ȯ��� ���� �ܺ� ���� �����κ��� ī��� LED�� ��ȣ�� �ָ� �������� ���Ͽ� �µ� ��ȭ�� ���� �ߵ� ���������� ��ǰ�� ������ �����մϴ�. ��ġ ȯ���� �����Ͽ� ���۵Ǵ� LED�� ��ο� ���� ���� ä���� ��⸦ �����Ͽ� �����ϰ� �ѷ��� ������ �����մϴ�.
| MBro-KHSV-MC1 | ||
| Network | Digital Interface | Gigabit Ethernet |
| Interface Rate | 1000Mbps | |
| Camera | Shutter Speed | 1��sec ~ 3600sec |
| Lens Mount | C/CS Mount | |
| Frame | 86fps | |
| Resolution | 656 x 488 (Mono), 656 x 488 (Color) | |
| Feature | ȸ���� �߿� ���� | |
| ����ȯ�濡 ������� | ||
| ���(Mono)�� � �� Video�� ������ ���� �ſ� �ε巴�� ����/Monitor ���� | ||
| Physical | Dimension/Weight | 55(W) x 55(H) x 50.5(D)mm/220g |





